SimpleMechanics
![]() This page is based on a Jupyter notebook.
This page is based on a Jupyter notebook.



The following example consists of a simple mechanics problem.
import os…
(click to toggle)
import os
from datetime import datetime
from pathlib import Path
import matplotlib.pyplot as plt
import numpy as np
import ogstools as otout_dir = Path(os.environ.get("OGS_TESTRUNNER_OUT_DIR", "_out"))
out_dir.mkdir(parents=True, exist_ok=True)
prj_name = "SimpleMechanics"…
(click to toggle)
prj_name = "SimpleMechanics"
model = ot.Project(output_file=(out_dir / f"{prj_name}.prj"))
model.geometry.add_geometry(filename="./square_1x1.gml")
model.mesh.add_mesh(filename="./square_1x1_quad_1e2.vtu")
model.processes.set_process(
name="SD",
type="SMALL_DEFORMATION",
integration_order="2",
specific_body_force="0 0",
)
model.processes.set_constitutive_relation(
type="LinearElasticIsotropic", youngs_modulus="E", poissons_ratio="nu"
)
model.processes.add_process_variable(
process_variable="process_variable", process_variable_name="displacement"
)
model.processes.add_secondary_variable(internal_name="sigma", output_name="sigma")
model.time_loop.add_process(
process="SD",
nonlinear_solver_name="basic_newton",
convergence_type="DeltaX",
norm_type="NORM2",
abstol="1e-15",
time_discretization="BackwardEuler",
)
model.time_loop.set_stepping(
process="SD",
type="FixedTimeStepping",
t_initial="0",
t_end="1",
repeat="4",
delta_t="0.25",
)
model.time_loop.add_output(
type="VTK",
prefix=prj_name,
repeat="1",
each_steps="4",
variables=["displacement", "sigma"],
)
model.media.add_property(
medium_id="0", phase_type="Solid", name="density", type="Constant", value="1"
)
model.parameters.add_parameter(name="E", type="Constant", value="1")
model.parameters.add_parameter(name="nu", type="Constant", value="0.3")
model.parameters.add_parameter(name="displacement0", type="Constant", values="0 0")
model.parameters.add_parameter(name="dirichlet0", type="Constant", value="0")
model.parameters.add_parameter(name="dirichlet1", type="Constant", value="0.05")
model.process_variables.set_ic(
process_variable_name="displacement",
components="2",
order="1",
initial_condition="displacement0",
)
model.process_variables.add_bc(
process_variable_name="displacement",
geometrical_set="square_1x1_geometry",
geometry="left",
type="Dirichlet",
component="0",
parameter="dirichlet0",
)
model.process_variables.add_bc(
process_variable_name="displacement",
geometrical_set="square_1x1_geometry",
geometry="bottom",
type="Dirichlet",
component="1",
parameter="dirichlet0",
)
model.process_variables.add_bc(
process_variable_name="displacement",
geometrical_set="square_1x1_geometry",
geometry="top",
type="Dirichlet",
component="1",
parameter="dirichlet1",
)
model.nonlinear_solvers.add_non_lin_solver(
name="basic_newton",
type="Newton",
max_iter="4",
linear_solver="general_linear_solver",
)
model.linear_solvers.add_lin_solver(
name="general_linear_solver",
kind="lis",
solver_type="cg",
precon_type="jacobi",
max_iteration_step="10000",
error_tolerance="1e-16",
)
model.linear_solvers.add_lin_solver(
name="general_linear_solver",
kind="eigen",
solver_type="CG",
precon_type="DIAGONAL",
max_iteration_step="10000",
error_tolerance="1e-16",
)
model.linear_solvers.add_lin_solver(
name="general_linear_solver",
kind="petsc",
prefix="sd",
solver_type="cg",
precon_type="bjacobi",
max_iteration_step="10000",
error_tolerance="1e-16",
)
try:
model.write_input()
model.run_model(
logfile=(out_dir / f"{prj_name}-out.txt"), args=f"-o {out_dir} -m ."
)
except Exception as inst:
print(f"{type(inst)}: {inst.args[0]}")
print(datetime.now())Project file written to output.
Simulation: /var/lib/gitlab-runner/builds/Sbm-BZZt4/1/ogs/build/release-all/Tests/Data/Mechanics/Linear/SimpleMechanics/SimpleMechanics.prj
Status: finished successfully.
Execution took 0.12003159523010254 s
2026-01-30 13:05:03.512972
ms = ot.MeshSeries(f"{out_dir}/{prj_name}.pvd").scale(time=("s", "a"))…
(click to toggle)
ms = ot.MeshSeries(f"{out_dir}/{prj_name}.pvd").scale(time=("s", "a"))
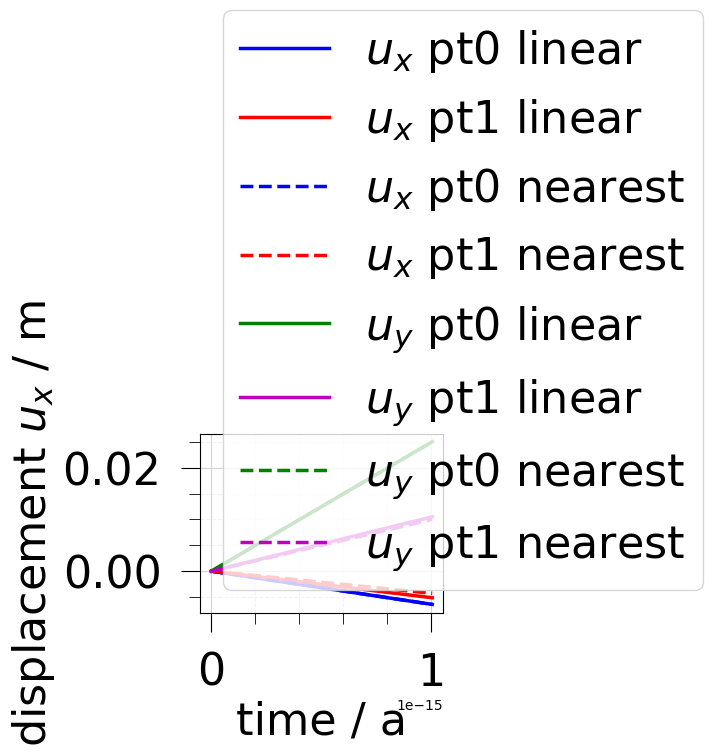
points_coords = np.array([[0.3, 0.5, 0.0], [0.24, 0.21, 0.0]])
points_labels = ["pt0", "pt1"]
fig, ax = plt.subplots(nrows=1, ncols=1)…
(click to toggle)
fig, ax = plt.subplots(nrows=1, ncols=1)
colors = {"x": ["b", "r"], "y": ["g", "m"]}
linestyles = {"linear": "-", "nearest": "--"}
for component in ["x", "y"]:
for interp_method in ["linear", "nearest"]:
labels = [f"$u_{component}$ {label} {interp_method}" for label in points_labels]
ms_pts = ot.MeshSeries.extract_probe(
ms, points_coords, interp_method=interp_method
).scale(time=("s", "a"))
ot.plot.line(
ms_pts,
"time",
ot.variables.displacement[component],
labels=labels,
ax=fig.axes[0],
colors=colors[component],
linestyle=linestyles[interp_method],
)
This article was written by Lars Bilke, Jörg Buchwald. If you are missing something or you find an error please let us know.
Generated with Hugo 0.147.9
in CI job 683680
|
Last revision: September 10, 2021